
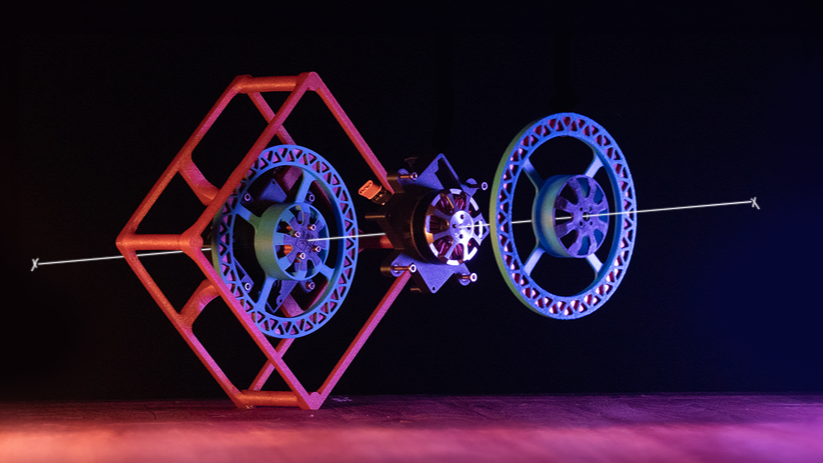
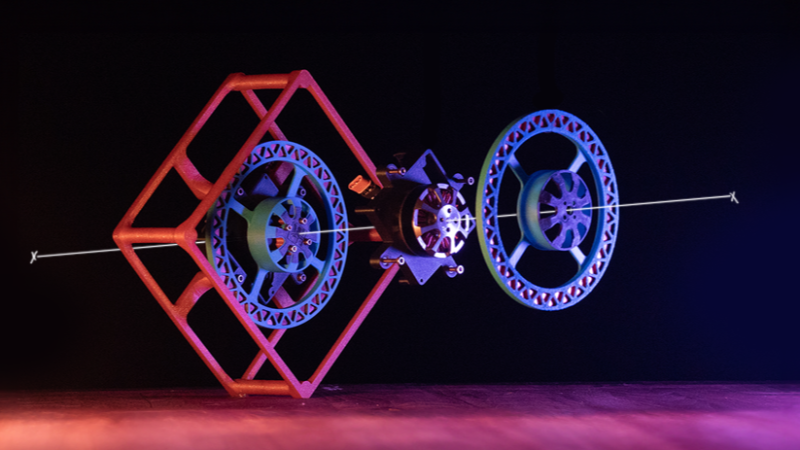
Balancing robots are always fun to see, as they often take forms we’re not used to, such as a box standing on its corner. This project, submitted by [Alexchunlin], showcases a cool single motor reaction cube, where he dives into many lessons learned during its creation.
At the outset, [Alexchunlin] thought this would be a quick, fun weekend project, and while he achieved that, it took longer than a weekend in the end. The cube’s frame was a simple 3D print with provisions to mount his MotorGo AXIS motor controller. This motor controller was initially designed for another project, but it’s great to see him reuse it in this build.
Once the parts were printed and assembled, the real work began: figuring out the best way to keep the cube balanced on its corner. This process involved several steps. The initial control code was very coarse, simply turning the motor on and off, but this didn’t provide the fine control needed for delicate balancing. The next step was implementing a PID control loop, which yielded much better results and allowed the cube to balance on a static surface for a good amount of time. The big breakthrough came when moving from a single PID loop to two control loops. In this configuration, the PID loop made smaller adjustments, while another control loop focused on the system’s total energy, making the cube much more stable.
By the end of the build, [Alexchunlin] had a cube capable of balancing in his hand, but more importantly, it was a great learning experience in controls. Be sure to visit the project page for more details on this build and check out his video below, which shows the steps he took along the way. If you find this project interesting, be sure to explore some of our other featured reaction wheel projects.
From Blog – Hackaday via this RSS feed